Welcome to My Personal Website
About Me
Dr. Guangda Chen is currently working as a Senior Robot Engineer at Fuxi Robotics in NetEase. He received his Ph.D. degree in Computer Science from University of Science and Technology of China in 2021.
Projects
Explore my research and development projects in robotics, including heavy machine automation, DRL-based navigation, and the Panda robot project.
Publications
Browse my academic publications, conference papers, and patents in the field of robotics and artificial intelligence.
Contact Information
Email: cgdsss@mail.ustc.edu.cn; cgdsss@zju.edu.cn
Address: NetEase, 399 Wangshang Road, Binjiang District, Hangzhou, China
Biography
Dr. Guangda Chen is currently working as a Senior Robot Engineer at Fuxi Robotics in NetEase. And he is also a postdoctoral researcher at the College of Control Science and Engineering, Zhejiang University (advised by Prof. Rong Xiong). He received his Ph.D. degree in Computer Science from University of Science and Technology of China in 2021 (BA17011, advised by Prof. Xiaoping Chen in the USTC Robotics Laboratory). Before joining USTC Robotics Lab in 2015, he received a Bachelor of Administration from China Medical University in 2014. As a graduate student, he focused on researching mobile robot navigation in dynamic and crowded environments. Currently, he is dedicated to developing and applying innovative automation and intelligent technologies in heavy construction machinery.Find him on:
Employment
Education
Ph.D. in Computer Science
University of Science and Technology of China [Prof. Xiaoping Chen]
Heavy Machine Automation (2021 - Present)
Planning and Control Group, Fuxi Robotics in NetEase.

DRL-based Navigation (2019 - 2021)
![[Media]](pdf/2023中国互联网大会创新十大典型案例.jpg){kind=link}
Panda Robot (2020 - 2021)
Group Leader, (PhD thesis, Ch. 4 and Ch. 5)
- Pedestrian detection and tracking, [Demo]
- Long-term robust localization, [Demo]
- Navigation in dense crowds, [Brief Demo], [Full Demo]
- Tour guide service v1.0, [Demo]

Kejia Robot (2015 - 2019)
Team: WrightEagle@Home
[TDP  ], [Poster ], [Report ], [Demo]
], [Poster ], [Report ], [Demo]

MoCap System (2016 - 2018)
for Testing:
- Cleaning Robots Test
- Anhui Robot Technology Standard Innovation Base
for Calibration:
- General Batch-Calibration Framework
- RGB-D Cameras Calibration
for Training:
- Real Simulation Unified Platform

Selected Publications
All publications: Google Scholar, ResearchGate.
* These authors contributed equally to the work.
Conference Presentations
Selected talks and presentations at academic conferences and industry events.
 Top100全球软件案例研究峰会
Top100全球软件案例研究峰会
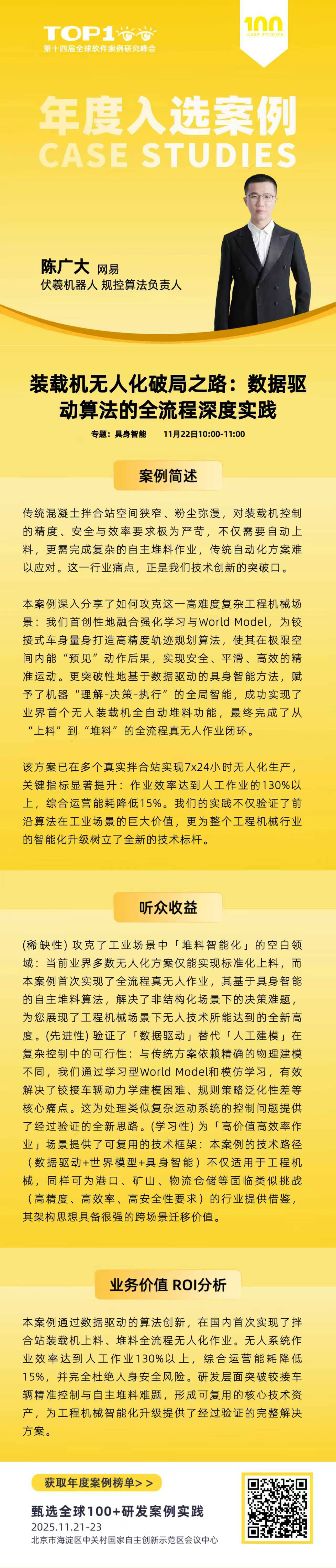
装载机无人化破局之路:数据驱动算法的全流程深度实践
Top100全球软件案例研究峰会
November 22, 2025 | 中关村, 北京
由MSUP主办的第十四届TOP100全球软件案例研究峰会(简称:TOP100 Summit)在北京圆满闭幕。本届峰会以“面向未来的组织演进与创新管理”为主题,汇聚了全球100余位技术创新者,探讨生成式AI、软硬件集成等趋势下的组织变革路径,为观众提供实用的指导和启示。大会期间,网易伏羲规控算法负责人陈博士发表了题为《装载机无人化破局之路:数据驱动算法的全流程深度实践》的演讲,系统分享了团队在装载机无人化领域的技术探索与实践经验。
更多媒体报道:网易伏羲公众号
报告官方链接:TOP100官网
Event Photos

 International Conference
International Conference
Modeling and Control of General Hydraulic Excavator for Human-in-the-loop Automation
IEEE 35th International Conference onTools with Artificial Intelligence (ICTAI 2023)
November 2023 | Atlanta, GA, USA
The paper, "Modeling and Control of General Hydraulic Excavator for Human-in-the-loop Automation," was presented at the IEEE 35th International Conference on Tools with Artificial Intelligence (ICTAI 2023). The research on human-in-the-loop automation for excavators was shared with the international community via an online presentation.
Full Paper (PDF): paper.pdf
Demonstration Video: YouTube
Event Photos

 International Conference
International Conference
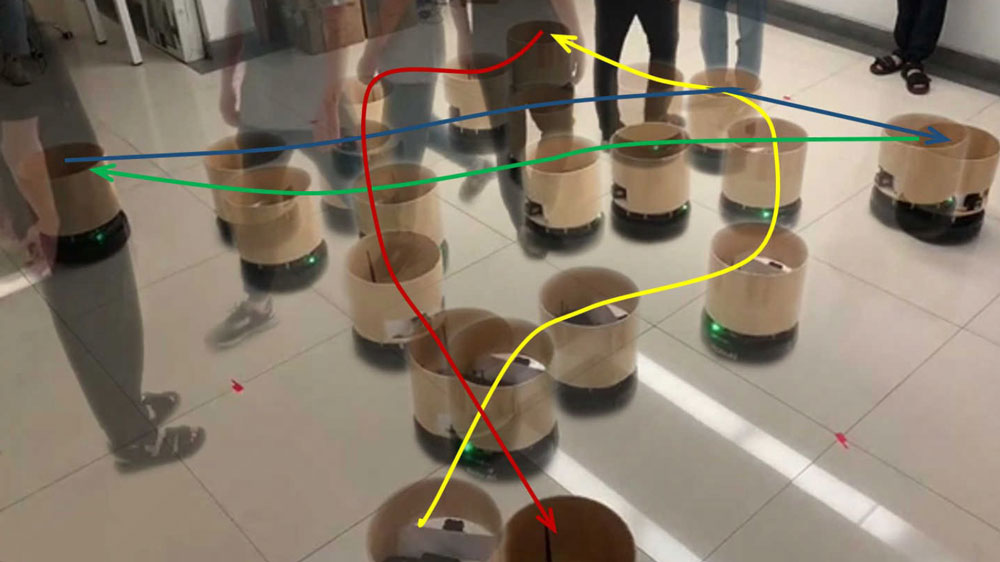
Robot Navigation with Map-Based Deep Reinforcement Learning
International Conference on Networking, Sensing, and Control (ICNSC 2020)
October 2020 | Nanjing, China
The paper titled "Robot Navigation with Map-Based Deep Reinforcement Learning" was presented at the ICNSC 2020. This research introduced a novel deep reinforcement learning framework for mobile robot navigation that effectively utilizes grid maps. The work was delivered through an oral presentation, highlighting its innovative approach to solving complex navigation tasks. This pioneering study laid the foundation for a series of subsequent research projects in DRL-based navigation within the research group. The significant contribution of this work was recognized with the Best Student Paper Award at the conference.
Event Photos